 |
DarkHelp
v1.9.7-1
C++ API for the neural network framework Darknet
|


|
|
DarkHelp
v1.9.7-1
C++ API for the neural network framework Darknet
|
|
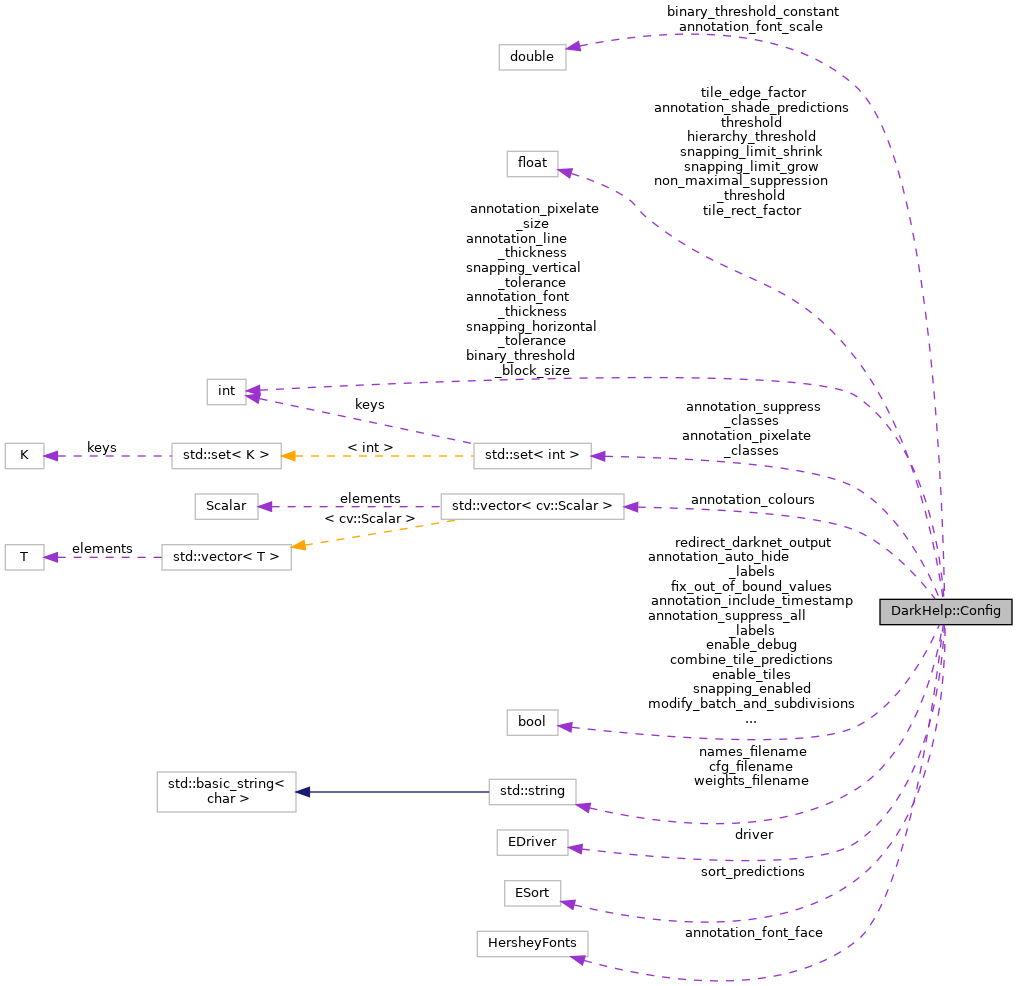
All of DarkHelp's configuration is stored within an instance of this class. More...
#include "DarkHelpConfig.hpp"
Public Member Functions | |
| Config () | |
| Constructor. More... | |
| Config (const std::string &cfg_fn, const std::string &weights_fn, const std::string &names_fn="", const bool verify_files_first=true, const EDriver d=EDriver::kDarknet) | |
| Constructor. More... | |
| ~Config () | |
| Destructor. More... | |
| Config & | reset () |
| Reset all config values to their default settings. More... | |
Public Attributes | |
| bool | annotation_auto_hide_labels |
| Hide the label if the size of the text exceeds the size of the prediction. More... | |
| VColours | annotation_colours |
| The colours to use in DarkHelp::NN::annotate(). More... | |
| cv::HersheyFonts | annotation_font_face |
Font face to use in DarkHelp::NN::annotate(). Defaults to cv::HersheyFonts::FONT_HERSHEY_SIMPLEX. More... | |
| double | annotation_font_scale |
Scaling factor used for the font in DarkHelp::NN::annotate(). Defaults to 0.5. More... | |
| int | annotation_font_thickness |
Thickness of the font in DarkHelp::NN::annotate(). Defaults to 1. More... | |
| bool | annotation_include_duration |
If set to true then DarkHelp::NN::annotate() will call DarkHelp::NN::duration_string() and display on the top-left of the image the length of time DarkHelp::NN::predict() took to process the image. More... | |
| bool | annotation_include_timestamp |
If set to true then DarkHelp::NN::annotate() will display a timestamp on the bottom-left corner of the image. More... | |
| int | annotation_line_thickness |
| Thickness of the lines to draw in DarkHelp::NN::annotate(). More... | |
| std::set< int > | annotation_pixelate_classes |
| This can be used to control which classes are pixelated when annotation_pixelate_enabled has been toggled. More... | |
| bool | annotation_pixelate_enabled |
If set to true then DarkHelp::NN::annotate() will call DarkHelp::pixelate_rectangles() to pixelate the predictions in the output image. More... | |
| int | annotation_pixelate_size |
| The size of the pixelation cell when calling DarkHelp::pixelate_rectangles(). More... | |
| float | annotation_shade_predictions |
| Determines the amount of "shade" used when drawing the prediction rectangles. More... | |
| bool | annotation_suppress_all_labels |
| Completely skip drawing any labels when annotating images. More... | |
| std::set< int > | annotation_suppress_classes |
| Determines which classes to suppress during the call to DarkHelp::NN::annotate(). More... | |
| int | binary_threshold_block_size |
| Block size (in pixels) to use when creating a black-and-white binary image. More... | |
| double | binary_threshold_constant |
| Constant to remove from each pixel value when converting image during thresholding. More... | |
| std::string | cfg_filename |
Filename (relative or absolute) for the Darknet/YOLO | |
| bool | combine_tile_predictions |
| When tiling is enabled, objects may span multiple tiles. More... | |
| EDriver | driver |
The driver initialization happens in DarkHelp::NN::init(). More... | |
| bool | enable_debug |
| This enables some non-specific debug functionality within the DarkHelp library. More... | |
| bool | enable_tiles |
| Determines if calls to DarkHelp::NN::predict() are sent directly to Darknet, or processed first by DarkHelp::NN::predict_tile() to break the image file into smaller sections. More... | |
| bool | fix_out_of_bound_values |
| Darknet sometimes will return values that are out-of-bound, especially with objects near the edges of the image, or when low detection thresholds. More... | |
| float | hierarchy_threshold |
| Used during prediction. More... | |
| bool | include_all_names |
| Determine if multiple class names are included when labelling an item. More... | |
| bool | modify_batch_and_subdivisions |
When training, the "batch=..." and "subdivisions=..." values in the .cfg file are typically set to a large value. More... | |
| std::string | names_filename |
Filename (relative or absolute) for the Darknet/YOLO | |
| bool | names_include_percentage |
| Determines if the name given to each prediction includes the percentage. More... | |
| float | non_maximal_suppression_threshold |
| Non-Maximal Suppression (NMS) threshold suppresses overlapping bounding boxes and only retains the bounding box that has the maximum probability of object detection associated with it. More... | |
| bool | only_combine_similar_predictions |
When combine_tile_predictions is enabled, this determines if an attempt is made to combine predictions even when the class does not match. More... | |
| bool | redirect_darknet_output |
Redirect Darknet output to /dev/null (Linux) or NUL: (Windows). More... | |
| bool | snapping_enabled |
| Toggle annotation snapping. More... | |
| int | snapping_horizontal_tolerance |
| Horizontal tolerance (in pixels) used when snapping annotations. More... | |
| float | snapping_limit_grow |
| When snapping is enabled, this is used to establish a maximum for snapping. More... | |
| float | snapping_limit_shrink |
| When snapping is enabled, this is used to establish a minimum for snapping. More... | |
| int | snapping_vertical_tolerance |
| Vertical tolerance (in pixels) used when snapping annotations. More... | |
| ESort | sort_predictions |
| Determines if the predictions will be sorted the next time DarkHelp::NN::predict() is called. More... | |
| float | threshold |
| Image prediction threshold. More... | |
| float | tile_edge_factor |
| This value controls how close to the edge of a tile an object must be to be considered for re-combining when both tiling and recombining have been enabled. More... | |
| float | tile_rect_factor |
| This value controls how close the rectangles needs to line up on two tiles before the predictions are combined. More... | |
| bool | use_fast_image_resize |
| Determine if DarkHelp should use a fast method of resizing images, or a slower but more accurate method. More... | |
| std::string | weights_filename |
Filename (relative or absolute) for the Darknet/YOLO | |
All of DarkHelp's configuration is stored within an instance of this class.
You can either instantiate a DarkHelp::NN object and then access DarkHelp::NN::config to set configuration as desired, or you can intantiate a DarkHelp::Config object and pass it in to the DarkHelp::NN constructor where it will be copied.
| DarkHelp::Config::Config | ( | ) |
Constructor.
| DarkHelp::Config::Config | ( | const std::string & | cfg_fn, |
| const std::string & | weights_fn, | ||
| const std::string & | names_fn = "", |
||
| const bool | verify_files_first = true, |
||
| const EDriver | d = EDriver::kDarknet |
||
| ) |
Constructor.
verify_files_first is set to true (the default value). This is because DarkHelp::verify_cfg_and_weights() is called to correctly determine which is the References cfg_filename, driver, DarkHelp::kDarknet, names_filename, DarkHelp::verify_cfg_and_weights(), and weights_filename.

| DarkHelp::Config::~Config | ( | ) |
Destructor.
| DarkHelp::Config & DarkHelp::Config::reset | ( | ) |
Reset all config values to their default settings.
References DarkHelp::get_default_annotation_colours(), DarkHelp::kAscending, and DarkHelp::kInvalid.

| bool DarkHelp::Config::annotation_auto_hide_labels |
Hide the label if the size of the text exceeds the size of the prediction.
This can help "clean up" some images which contain many small objects. Set to false to always display every label. Set to true if DarkHelp should decide whether a label must be shown or hidden. Defaults to true.
Examples:
| Setting | Image |
|---|---|
auto_hide_labels=true | 
|
auto_hide_labels=false | 
|
Referenced by configure(), EnableAnnotationAutoHideLabels(), init(), main(), and process_image().
| VColours DarkHelp::Config::annotation_colours |
The colours to use in DarkHelp::NN::annotate().
Defaults to DarkHelp::get_default_annotation_colours().
Remember that OpenCV uses BGR, not RGB. For example, pure red is "(0, 0, 255)".
Referenced by main().
| cv::HersheyFonts DarkHelp::Config::annotation_font_face |
Font face to use in DarkHelp::NN::annotate(). Defaults to cv::HersheyFonts::FONT_HERSHEY_SIMPLEX.
Referenced by configure(), and display_current_msg().
| double DarkHelp::Config::annotation_font_scale |
Scaling factor used for the font in DarkHelp::NN::annotate(). Defaults to 0.5.
Referenced by display_current_msg(), init(), main(), and SetAnnotationFontScale().
| int DarkHelp::Config::annotation_font_thickness |
Thickness of the font in DarkHelp::NN::annotate(). Defaults to 1.
Referenced by configure(), display_current_msg(), and SetAnnotationFontThickness().
| bool DarkHelp::Config::annotation_include_duration |
If set to true then DarkHelp::NN::annotate() will call DarkHelp::NN::duration_string() and display on the top-left of the image the length of time DarkHelp::NN::predict() took to process the image.
Defaults to true.
When enabed, the duration may look similar to this:

Referenced by configure(), EnableAnnotationIncludeDuration(), init(), main(), process_image(), and process_video().
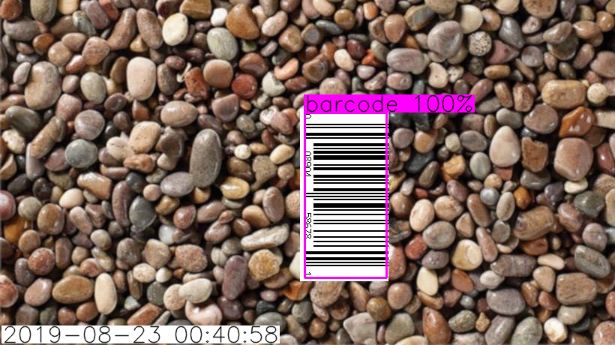
| bool DarkHelp::Config::annotation_include_timestamp |
If set to true then DarkHelp::NN::annotate() will display a timestamp on the bottom-left corner of the image.
Defaults to false.
When enabled, the timestamp may look similar to this:
Referenced by configure(), EnableAnnotationIncludeTimestamp(), init(), and main().
| int DarkHelp::Config::annotation_line_thickness |
Thickness of the lines to draw in DarkHelp::NN::annotate().
Annotations will not be drawn if this is set to 0 (zero). Defaults to 2.
Referenced by init(), main(), and SetAnnotationLineThickness().
| std::set<int> DarkHelp::Config::annotation_pixelate_classes |
This can be used to control which classes are pixelated when annotation_pixelate_enabled has been toggled.
By default if pixelation has been enabled then all predictions from all classes are pixelated. If only some classes should be pixelated, then the class IDs can be added to this set.
For example, say your classes are:
If you only want people to be pixelated, then you'd add 1 to this set:
(Classes are always zero-based, so vehicle would be class #0 and person would be class #1.)
| bool DarkHelp::Config::annotation_pixelate_enabled |
If set to true then DarkHelp::NN::annotate() will call DarkHelp::pixelate_rectangles() to pixelate the predictions in the output image.
Referenced by EnableAnnotationPixelate(), init(), and main().
| int DarkHelp::Config::annotation_pixelate_size |
The size of the pixelation cell when calling DarkHelp::pixelate_rectangles().
This is only used when annotation_pixelate_enabled has also been set to true. The size must be >=5, otherwise pixelation will be ignored.
| Setting | Image |
|---|---|
annotation_pixelate_enabled=false | |
annotation_pixelate_enabled=true annotation_pixelate_size=5 | |
annotation_pixelate_enabled=true annotation_pixelate_size=15 | |
annotation_pixelate_enabled=true annotation_pixelate_size=25 |
Referenced by SetAnnotationPixelateSize().
| float DarkHelp::Config::annotation_shade_predictions |
Determines the amount of "shade" used when drawing the prediction rectangles.
When set to zero, the rectangles are not shaded. When set to 1.0, prediction recangles are completely filled. Values in between are semi-transparent. For example, the default value of 0.25 means the rectangles are filled at 25% opacity.
Examples:
| Setting | Image |
|---|---|
annotation_shade_predictions=0.0 | 
|
annotation_shade_predictions=0.25 | 
|
annotation_shade_predictions=0.50 | 
|
annotation_shade_predictions=0.75 | 
|
annotation_shade_predictions=1.0 | 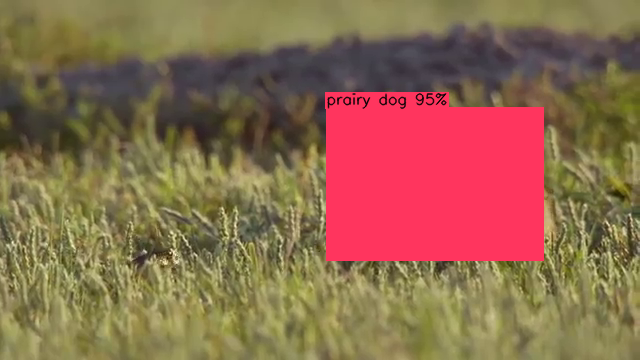
|
Referenced by configure(), init(), process_image(), and SetAnnotationShadePredictions().
| bool DarkHelp::Config::annotation_suppress_all_labels |
Completely skip drawing any labels when annotating images.
Defaults to false.
Referenced by EnableAnnotationSuppressAllLabels(), init(), and process_image().
| std::set<int> DarkHelp::Config::annotation_suppress_classes |
Determines which classes to suppress during the call to DarkHelp::NN::annotate().
Any prediction returned by Darknet for a class listed in this std::set will be ignored: no bounding box will be drawn, and no label will be shown. The set may be modified at any point and will take effect the next time DarkHelp::NN::annotate() is called.
It is initialized by DarkHelp::NN::init() to contain any classes where the label name begins with the text "dont_show" as described in https://github.com/AlexeyAB/darknet/issues/2122.
For example, when considering this annotated image:
If the .names file is modified in this manner:
Then the annotated image will look like this:
DarkHelp::Config::annotation_suppress_classes. | int DarkHelp::Config::binary_threshold_block_size |
Block size (in pixels) to use when creating a black-and-white binary image.
This is only used when snapping_enabled is set to true or manually calling DarkHelp::NN::snap_annotations(). Default size is 25.
cv::adaptiveThreshold() Referenced by SetBinaryThresholdBlockSize().
| double DarkHelp::Config::binary_threshold_constant |
Constant to remove from each pixel value when converting image during thresholding.
This is only used when snapping_enabled is set to true or manually calling DarkHelp::NN::snap_annotations(). Default is 25.0.
cv::adaptiveThreshold() Referenced by SetBinaryThresholdConstant().
| std::string DarkHelp::Config::cfg_filename |
Filename (relative or absolute) for the Darknet/YOLO .cfg file.
Call DarkHelp::NN::init() after changing this field to force the neural network to be re-loaded.
Referenced by Config(), and GetPredictionResults().
| bool DarkHelp::Config::combine_tile_predictions |
When tiling is enabled, objects may span multiple tiles.
When this flag is set to true, DarkHelp will attempt to combine predictions that cross two or more tiles into a single prediction. This has no impact when tiling is off, or when the image processed fits within a single tile. Default is true.
| Image | Description |
|---|---|

| For example, the image on the left is a portion of a much larger image. |
| The blue horizontal line in this image shows the location of the boundary between two image tiles. |
| When combine_tile_predictions=false, the predictions which are split by a tile boundary look like this. |
| When combine_tile_predictions=true, the predictions split by a tile boundary are re-combined into a single object. |
Referenced by configure(), EnableCombineTilePredictions(), and process_image().
| EDriver DarkHelp::Config::driver |
The driver initialization happens in DarkHelp::NN::init().
If you change this configuration value, you must remember to call DarkHelp::NN::init() to force the neural network to be re-initialized.
Referenced by Config(), and GetPredictionResults().
| bool DarkHelp::Config::enable_debug |
This enables some non-specific debug functionality within the DarkHelp library.
The exact results of enabling this is undocumented, and will change or may be completely removed without prior notice. It is not meant for the end-user, but instead is used for developers debugging DarkHelp and Darknet. Default value is false.
Referenced by configure(), and init().
| bool DarkHelp::Config::enable_tiles |
Determines if calls to DarkHelp::NN::predict() are sent directly to Darknet, or processed first by DarkHelp::NN::predict_tile() to break the image file into smaller sections.
This flag is only checked when DarkHelp::NN::predict() is called. If you call DarkHelp::NN::predict_tile() directly, then it bypasses the check for DarkHelp::Config::enable_tiles and DarkHelp will assume that the image is a candidate for tiling.
Both DarkHelp::NN::predict() and DarkHelp::NN::predict_tile() will set the values DarkHelp::NN::tile_size, DarkHelp::NN::vertical_tiles, and DarkHelp::NN::horizontal_tiles once they have finished running. The caller can then reference these to determine what kind of tiling was used. Even when an image is not tiled, these variables will be set; for example, DarkHelp::NN::tile_size may be set to 1x1, and the horizontal and vertical sizes will match the neural network dimensions.
The default value for DarkHelp::Config::enable_tiles is false, meaning that calling DarkHelp::NN::predict() wont automatically result in image tiling.
Referenced by configure(), EnableTiles(), GetPredictionResults(), init(), main(), and process_image().
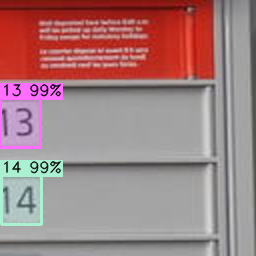
| bool DarkHelp::Config::fix_out_of_bound_values |
Darknet sometimes will return values that are out-of-bound, especially with objects near the edges of the image, or when low detection thresholds.
For example, the X or Y coordinates might be less than zero, or the width and height might extend beyond the edges of the image. When fix_out_of_bound_values is set to true (the default) then the results (DarkHelp::NN::prediction_results) after calling DarkHelp::NN::predict() will be capped so all values are positive and do not extend beyond the edges of the image. When set to false, the exact values as returned by darknet will be used. Defaults to true.
For example:
| Image | Configuration | JSON output | comment |
|---|---|---|---|

| Left portion of the original image. Note the number 13. | ||
| fix_out_of_bound_values=false | "rect": {"height": 25, "width": 21, "x": -1, "y": 220} | The X coordinate is invalid! |
| fix_out_of_bound_values=true | "rect": {"height": 25, "width": 20, "x": 0, "y": 220} | Both the X and width have been "fixed". |
Referenced by configure().
| float DarkHelp::Config::hierarchy_threshold |
Used during prediction.
Defaults to 0.5.
Quote:
[...] the network traverses the tree of candidate detections and multiples through the conditional probabilities for each item, e.g. object * animal * feline * house cat. The hierarchical threshold is used in this second step, completely after and separate from whether there is an item or not, to decide whether following the tree further to a more specific class is the right action to take. When this threshold is 0, the tree will basically follow the highest probability branch all the way to a leaf node. [source]
hierchy_threshold. The typo in the name was fixed in December 2019. Referenced by init().
| bool DarkHelp::Config::include_all_names |
Determine if multiple class names are included when labelling an item.
For example, if an object is 95% car or 80% truck, then the label could say "car, truck" when this is set to true, and simply "car" when set to false. Defaults to true.
Referenced by configure(), and EnableIncludeAllNames().
| bool DarkHelp::Config::modify_batch_and_subdivisions |
When training, the "batch=..." and "subdivisions=..." values in the .cfg file are typically set to a large value.
But when loading a neural network for inference as DarkHelp is designed to help with, both of those values in the .cfg should be set to "1". When modify_batch_and_subdivisions is enabled, DarkHelp will edit the configuration file once DarkHelp::NN::init() is called. This ensures the values are set as needed prior to Darknet loading the .cfg file.
The default value for modify_batch_and_subdivisions is true, meaning the .cfg file will be modified. If set to false, DarkHelp will not modify the configuration file.
Example use:
use_cuda_graph=1 flag in the use_cuda_graph. Because this new option was suspected of causing some problems with some segfaults and object detection problems in some situations, this code was commented out again in v1.1.13 on 2021-04-08. Referenced by configure().
| std::string DarkHelp::Config::names_filename |
Filename (relative or absolute) for the Darknet/YOLO .names file.
Call DarkHelp::NN::init() after changing this field to force the neural network to be re-loaded.
Referenced by Config(), and GetPredictionResults().
| bool DarkHelp::Config::names_include_percentage |
Determines if the name given to each prediction includes the percentage.
For example, the name for a prediction might be "dog" when this flag is set to false, or it might be "dog 98%" when set to true. Defaults to true.
Examples:
| Setting | Image |
|---|---|
names_include_percentage=true | 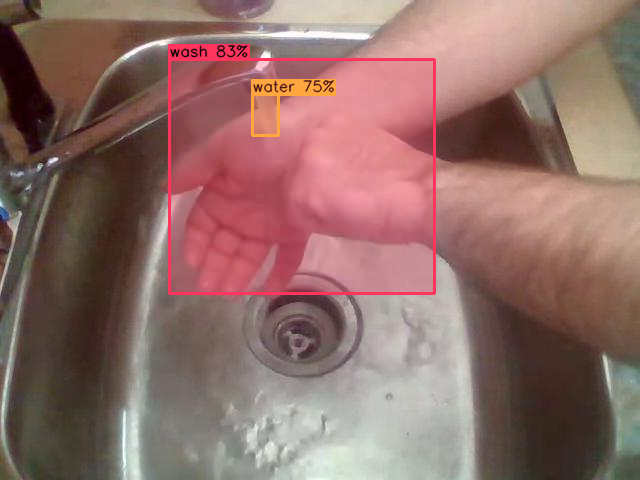
|
names_include_percentage=false | 
|
Referenced by configure(), EnableNamesIncludePercentage(), GetPredictionResults(), and init().
| float DarkHelp::Config::non_maximal_suppression_threshold |
Non-Maximal Suppression (NMS) threshold suppresses overlapping bounding boxes and only retains the bounding box that has the maximum probability of object detection associated with it.
Defaults to 0.45.
Quote:
[...] nms works by looking at all bounding boxes that made it past the 'objectness' threshold and removes the least confident of the boxes that overlap with each other above a certain IOU threshold [source]
(IOU – "intersection over union" – is a ratio that describes how much two areas overlap, where 0.0 means two areas don't overlap at all, and 1.0 means two areas perfectly overlap.)
Referenced by configure(), GetPredictionResults(), init(), and SetNonMaximalSuppression().
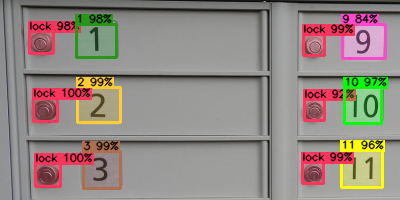
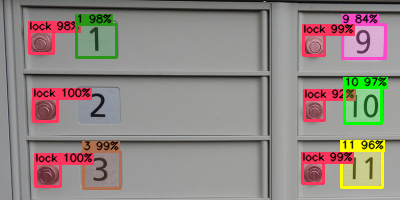
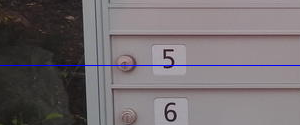
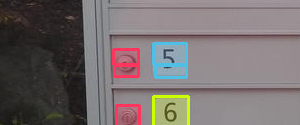
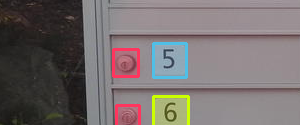
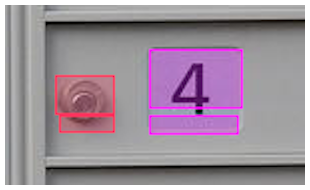
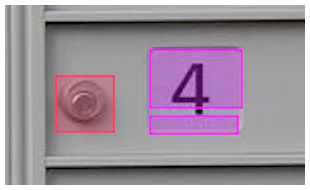
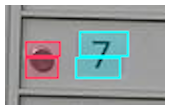
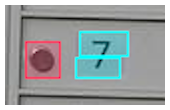
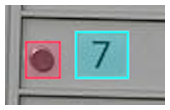
| bool DarkHelp::Config::only_combine_similar_predictions |
When combine_tile_predictions is enabled, this determines if an attempt is made to combine predictions even when the class does not match.
Default is true.
Note that when set to true, this compares all classes for the annotations. For example:
| Image | Description |
|---|---|

| Portion of original image. |

| Annotated image when tiling is enabled and combination is disabled. This shows how the lock and "5" are split across multiple tiles, and how a tiny portion of the "5" seems to initially be annotated as a "6". |

| The blue lines show where the tile edges are located. There are 4 tiles involved in this example. |
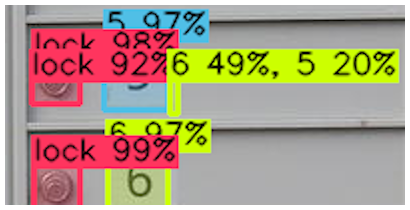
| Annotated image with full text labels. It is important to note how the small sliver on the right is 49% likely to be a "6" and 20% to be a "5". This is important since by default DarkHelp only combines annotations which have a class in common. |
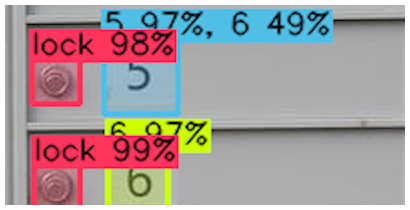
| Once DarkHelp::Config::combine_tile_predictions has been enabled, the small sliver on the right was successfully combined into the "5". |

| The final annotations once combination has been performed. |
Referenced by configure(), and EnableOnlyCombineSimilarPredictions().
| bool DarkHelp::Config::redirect_darknet_output |
Redirect Darknet output to /dev/null (Linux) or NUL: (Windows).
Darknet by default generates a lot of output on both STDOUT and STDERR at startup. When this option is set to true, DarkHelp will temporarily redirect both STDOUT and STDERR to discard that output while the network is loading. Once all the network layers are loaded, both STDOUT and STDERR are restored.
The default is false (meaning Darknet's output will be shown).
Darknet::set_output_stream() for details. Referenced by GetPredictionResults(), and init().
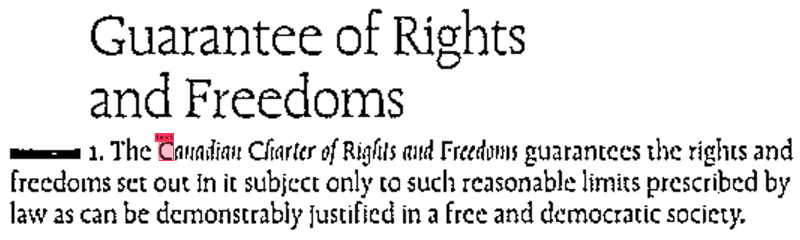
| bool DarkHelp::Config::snapping_enabled |
Toggle annotation snapping.
This automatically creates and uses a binary black-and-white image of the original image to try and "snap" the annotations to an object. Note that this is non-trivial and will slightly increase the processing time. The default is false.
Snapping is mostly intended to be used with dark-coloured items on a light background, such as text on paper. If you turn this on, you may also need to modify DarkHelp::Config::binary_threshold_block_size, DarkHelp::Config::binary_threshold_constant, DarkHelp::Config::snapping_horizontal_tolerance, and DarkHelp::Config::snapping_vertical_tolerance.
| Image | Setting |
|---|---|
| snapping_enabled=false |
| snapping_enabled=true |
Referenced by EnableSnapping(), GetPredictionResults(), init(), main(), and process_image().
| int DarkHelp::Config::snapping_horizontal_tolerance |
Horizontal tolerance (in pixels) used when snapping annotations.
This is only used when snapping_enabled is set to true or manually calling DarkHelp::NN::snap_annotations(). Default is 5.
For example, when working with text, you may need to increase this if you want to automatically snap the annotations to grab multiple consecutive words in a sentence. If you want to select a single word, then decrease this value so snapping ends at the end of a word. If you lower it too much, you'll grab individual letters instead of words.
| Image | Setting |
|---|---|
| snapping_horizontal_tolerance=1 snapping_vertical_tolerance=1 |
| snapping_horizontal_tolerance=2 snapping_vertical_tolerance=1 |
| snapping_horizontal_tolerance=3 snapping_vertical_tolerance=1 |
| snapping_horizontal_tolerance=7 snapping_vertical_tolerance=1 |
| snapping_horizontal_tolerance=7 snapping_vertical_tolerance=3 |
| snapping_horizontal_tolerance=7 snapping_vertical_tolerance=15 |
Referenced by init(), and SetSnappingHorizontalTolerance().
| float DarkHelp::Config::snapping_limit_grow |
When snapping is enabled, this is used to establish a maximum for snapping.
If the snapped annotation grows to a value greater than this amount, the "snap" is ignored and the original annotation is retained.
The valid range for this is any number larger than or equal to 1.0. If set to 0, then no maximum limit will be applied during snapping. If set to exactly 1, then snapping cannot grow annotations, it can only shrink them. The default is 1.25.
Referenced by SetSnappingLimitGrow().
| float DarkHelp::Config::snapping_limit_shrink |
When snapping is enabled, this is used to establish a minimum for snapping.
If the snapped annotation shrinks to a value smaller than this amount, the "snap" is ignored and the original annotation is retained.
The valid range for this is any number between 0 and 1.0. If set to 0, then no minimum limit will be applied during snapping. If set to exactly 1, then snapping cannot shrink annotations, it can only grow them. The default is 0.4.
Referenced by SetSnappingLimitShrink().
| int DarkHelp::Config::snapping_vertical_tolerance |
Vertical tolerance (in pixels) used when snapping annotations.
This is only used when snapping_enabled is set to true or manually calling DarkHelp::NN::snap_annotations(). Default is 5.
For example, when working with text, you may need to increase this if you want to automatically snap the annotations to grab an entire paragraph. Smaller values will limit the snap to a single line of text.
Referenced by init(), and SetSnappingVerticalTolerance().
| ESort DarkHelp::Config::sort_predictions |
Determines if the predictions will be sorted the next time DarkHelp::NN::predict() is called.
When set to DarkHelp::ESort::kUnsorted, the predictions are in the exact same order as they were returned by Darknet. When set to DarkHelp::ESort::kAscending or DarkHelp::ESort::kDescending, the predictions will be sorted according to DarkHelp::PredictionResult::best_probability.
If annotations will be drawn on the image for visual consumption, then it is often preferable to have the higher probability predictions drawn last so they appear "on top". Otherwise, lower probability predictions may overwrite or obscure the more important ones. This means using DarkHelp::ESort::kAscending (the default).
If you want to process only the first few predictions instead of drawing annotations, then you may want to sort using DarkHelp::ESort::kDescending to ensure you handle the most likely predictions first.
Defaults to DarkHelp::ESort::kAscending.
Referenced by configure().
| float DarkHelp::Config::threshold |
Image prediction threshold.
Defaults to 0.5.
Quote:
[...] threshold is what is used to determine whether or not there is an object in the predicted bounding box. The network predicts an explicit 'objectness' score separate from the class predictions that if above the threshold indicates that a bounding box will be returned. [source]
Referenced by configure(), GetPredictionResults(), init(), main(), process_image(), and SetThreshold().
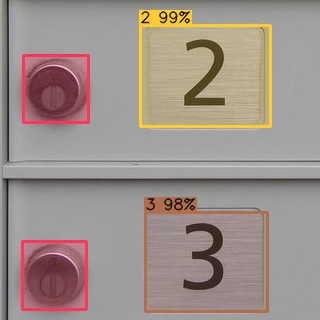
| float DarkHelp::Config::tile_edge_factor |
This value controls how close to the edge of a tile an object must be to be considered for re-combining when both tiling and recombining have been enabled.
The smaller the value, the closer the object must be to the edge of a tile. The factor is multiplied by the width and height of the detected object.
Possible range to consider would be 0.01 to 0.5. If set to zero, then the detected object must be right on the tile boundary to be considered. The default is 0.25.
| Image | Setting |
|---|---|
| combine_tile_predictions=false |
| combine_tile_predictions=true tile_edge_factor=0.05 |

| combine_tile_predictions=true tile_edge_factor=0.15 |
Referenced by configure(), init(), and SetTileEdgeFactor().
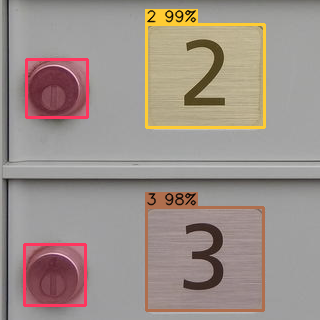
| float DarkHelp::Config::tile_rect_factor |
This value controls how close the rectangles needs to line up on two tiles before the predictions are combined.
This is only used when both tiling and recombining have been enabled. As the value approaches 1.0, the closer the rectangles have to be "perfect" to be combined. Values below 1.0 are impossible, and predictions will never be combined. Possible range to consider might be 1.10 to 1.50 or even higher; this also depends on the nature/shape of the objects detected and how the tiles are split up. For example, if the objects are pear-shaped, where the smaller end is on one tile and the larger end on another tile, you may need to increase this value as the object on the different tiles will be of different sizes. The default is 1.20.
| Image | Setting |
|---|---|
| tile_rect_factor=1.00 |
| tile_rect_factor=1.10 |
| tile_rect_factor=1.20 |
Referenced by configure(), init(), and SetTileRectFactor().
| bool DarkHelp::Config::use_fast_image_resize |
Determine if DarkHelp should use a fast method of resizing images, or a slower but more accurate method.
By default, the OpenCV cv::INTER_NEAREST method will be used. This is faster, but the image quality may be impacted. If this is set to false, then DarkHelp will use OpenCV's INTER_AREA or INTER_CUBIC, which are slower but result in better images.
For "real world" images, the default of true for this option is probably what you want. If you are working with documents that contain black-and-white text, or zoomed-in images such as close-ups of barcodes and components to detect manufacturing detects, you probably want to set this to false.
Referenced by EnableUseFastImageResize().
| std::string DarkHelp::Config::weights_filename |
Filename (relative or absolute) for the Darknet/YOLO .weights file.
Call DarkHelp::NN::init() after changing this field to force the neural network to be re-loaded.
Referenced by Config(), and GetPredictionResults().
 1.8.17
1.8.17