|
Darknet/YOLO v6.0-57-gda64b9bc
Object Detection Framework
|

|
|
Darknet/YOLO v6.0-57-gda64b9bc
Object Detection Framework
|
|
A much-simplified version of the old API structure DarknetDetection. More...
#include "darknet.hpp"
Public Attributes | |
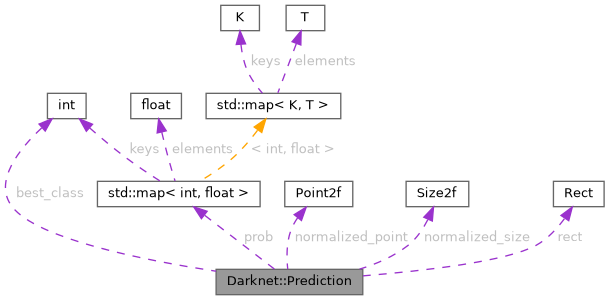
| int | best_class |
Zero-based class index, or -1 if nothing was found in an image. | |
| cv::Point2f | normalized_point |
| The center point of the object. This value is normalized and must be multiplied by the image dimensions. | |
| cv::Size2f | normalized_size |
| The dimensions of the object. This value is normalized and must be multiplied by the image dimensions. | |
| Probabilities | prob |
| The probability for each object. Only non-zero values are kept. | |
| cv::Rect | rect |
| The de-normalized bounding box, where the coordinates have been multiplied by the original image width and height. | |
A much-simplified version of the old API structure DarknetDetection.
| int Darknet::Prediction::best_class |
Zero-based class index, or -1 if nothing was found in an image.
| cv::Point2f Darknet::Prediction::normalized_point |
The center point of the object. This value is normalized and must be multiplied by the image dimensions.
| cv::Size2f Darknet::Prediction::normalized_size |
The dimensions of the object. This value is normalized and must be multiplied by the image dimensions.
| Probabilities Darknet::Prediction::prob |
The probability for each object. Only non-zero values are kept.
| cv::Rect Darknet::Prediction::rect |
The de-normalized bounding box, where the coordinates have been multiplied by the original image width and height.