|
OpenCV
4.1.1-pre
Open Source Computer Vision
|


|
|
OpenCV
4.1.1-pre
Open Source Computer Vision
|
|

|
Functions | |
| template<typename _Tp , int _rows, int _cols, int _options, int _maxRows, int _maxCols> | |
| static void | cv::cv2eigen (const Mat &src, Eigen::Matrix< _Tp, _rows, _cols, _options, _maxRows, _maxCols > &dst) |
| template<typename _Tp , int _rows, int _cols, int _options, int _maxRows, int _maxCols> | |
| static void | cv::cv2eigen (const Matx< _Tp, _rows, _cols > &src, Eigen::Matrix< _Tp, _rows, _cols, _options, _maxRows, _maxCols > &dst) |
| template<typename _Tp > | |
| static void | cv::cv2eigen (const Mat &src, Eigen::Matrix< _Tp, Eigen::Dynamic, Eigen::Dynamic > &dst) |
| template<typename _Tp , int _rows, int _cols> | |
| static void | cv::cv2eigen (const Matx< _Tp, _rows, _cols > &src, Eigen::Matrix< _Tp, Eigen::Dynamic, Eigen::Dynamic > &dst) |
| template<typename _Tp > | |
| static void | cv::cv2eigen (const Mat &src, Eigen::Matrix< _Tp, Eigen::Dynamic, 1 > &dst) |
| template<typename _Tp , int _rows> | |
| static void | cv::cv2eigen (const Matx< _Tp, _rows, 1 > &src, Eigen::Matrix< _Tp, Eigen::Dynamic, 1 > &dst) |
| template<typename _Tp > | |
| static void | cv::cv2eigen (const Mat &src, Eigen::Matrix< _Tp, 1, Eigen::Dynamic > &dst) |
| template<typename _Tp , int _cols> | |
| static void | cv::cv2eigen (const Matx< _Tp, 1, _cols > &src, Eigen::Matrix< _Tp, 1, Eigen::Dynamic > &dst) |
| template<typename _Tp , int _rows, int _cols, int _options, int _maxRows, int _maxCols> | |
| static void | cv::eigen2cv (const Eigen::Matrix< _Tp, _rows, _cols, _options, _maxRows, _maxCols > &src, OutputArray dst) |
| template<typename _Tp , int _rows, int _cols, int _options, int _maxRows, int _maxCols> | |
| static void | cv::eigen2cv (const Eigen::Matrix< _Tp, _rows, _cols, _options, _maxRows, _maxCols > &src, Matx< _Tp, _rows, _cols > &dst) |
|
inlinestatic |
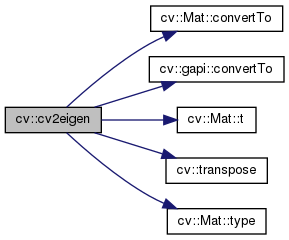
#include <opencv2/core/eigen.hpp>
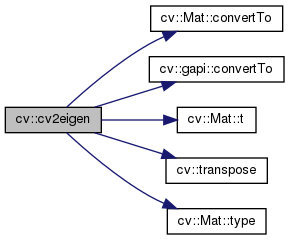
References cv::Mat::cols, cv::Mat::convertTo(), cv::gapi::convertTo(), CV_DbgAssert, cv::Mat::rows, cv::Mat::t(), cv::transpose(), and cv::Mat::type().
|
inlinestatic |
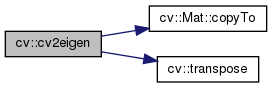
#include <opencv2/core/eigen.hpp>
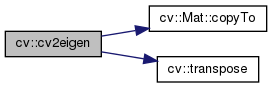
References cv::Mat::copyTo(), and cv::transpose().
|
inlinestatic |
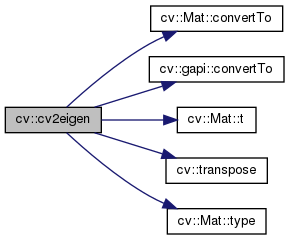
#include <opencv2/core/eigen.hpp>
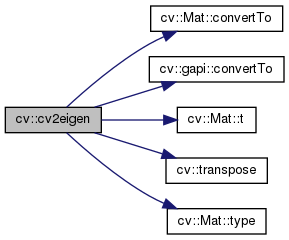
References cv::Mat::cols, cv::Mat::convertTo(), cv::gapi::convertTo(), cv::Mat::rows, cv::Mat::t(), cv::transpose(), and cv::Mat::type().
|
inlinestatic |
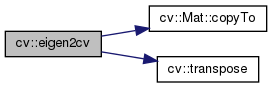
#include <opencv2/core/eigen.hpp>
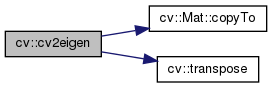
References cv::Mat::copyTo(), and cv::transpose().
|
inlinestatic |
#include <opencv2/core/eigen.hpp>
References cv::Mat::cols, cv::Mat::convertTo(), cv::gapi::convertTo(), CV_Assert, cv::Mat::rows, cv::Mat::t(), cv::transpose(), and cv::Mat::type().
|
inlinestatic |
#include <opencv2/core/eigen.hpp>
References cv::transpose().

|
inlinestatic |
#include <opencv2/core/eigen.hpp>
References cv::Mat::cols, cv::Mat::convertTo(), cv::gapi::convertTo(), CV_Assert, cv::Mat::rows, cv::Mat::t(), cv::transpose(), and cv::Mat::type().
|
inlinestatic |
#include <opencv2/core/eigen.hpp>
References cv::Mat::copyTo(), and cv::transpose().
|
inlinestatic |
#include <opencv2/core/eigen.hpp>
References cv::Mat::copyTo(), and cv::transpose().
|
inlinestatic |
#include <opencv2/core/eigen.hpp>
References cv::Matx< _Tp, m, n >::t().

 1.8.13
1.8.13